Robot Motion Planning Knowledge Collection
This pages is used to record knowledge about Motion Planning.
Moveit
如果你在Ubuntu上已经安装好了ROS2 Desktop。尽管Moveit是默认没有安装的,但是你可以快速clone仓库,然后编译安装。
## 默认没有安装colcon mixin版本,这里需要
sudo apt install python3-colcon-mixin
colcon mixin add default https://raw.githubusercontent.com/colcon/colcon-mixin-repository/master/index.yaml
colcon mixin update default
## create folder
mkdir -p ws_moveit/src
cs ws_moveit/src
## clone repository
git clone https://github.com/ros-planning/moveit2_tutorials
## download others from Moveit
vcs import < moveit2_tutorials/moveit2_tutorials.repos
## build
sudo apt update && rosdep install -r --from-paths . --ignore-src --rosdistro $ROS_DISTRO -y
## config colcon
cd ..
## 我最初使用下面这条命令,colcon会以全速去编译,结果导致ubuntu崩溃。
colcon build --mixin release
## 改用下面这条命令,速度会慢一些(但也就30秒左右)。顺利完成编译。
## 使用nproc查询,我可以同时执行20路并行任务。
colcon build --mixin release --parallel-workers 8
## 最后设置一下moveit,我的路径不同,可以用pwd查看。
source ~/ws_moveit/install/setup.bash
## or
echo 'source ~/ws_moveit/install/setup.bash' >> ~/.bashrc
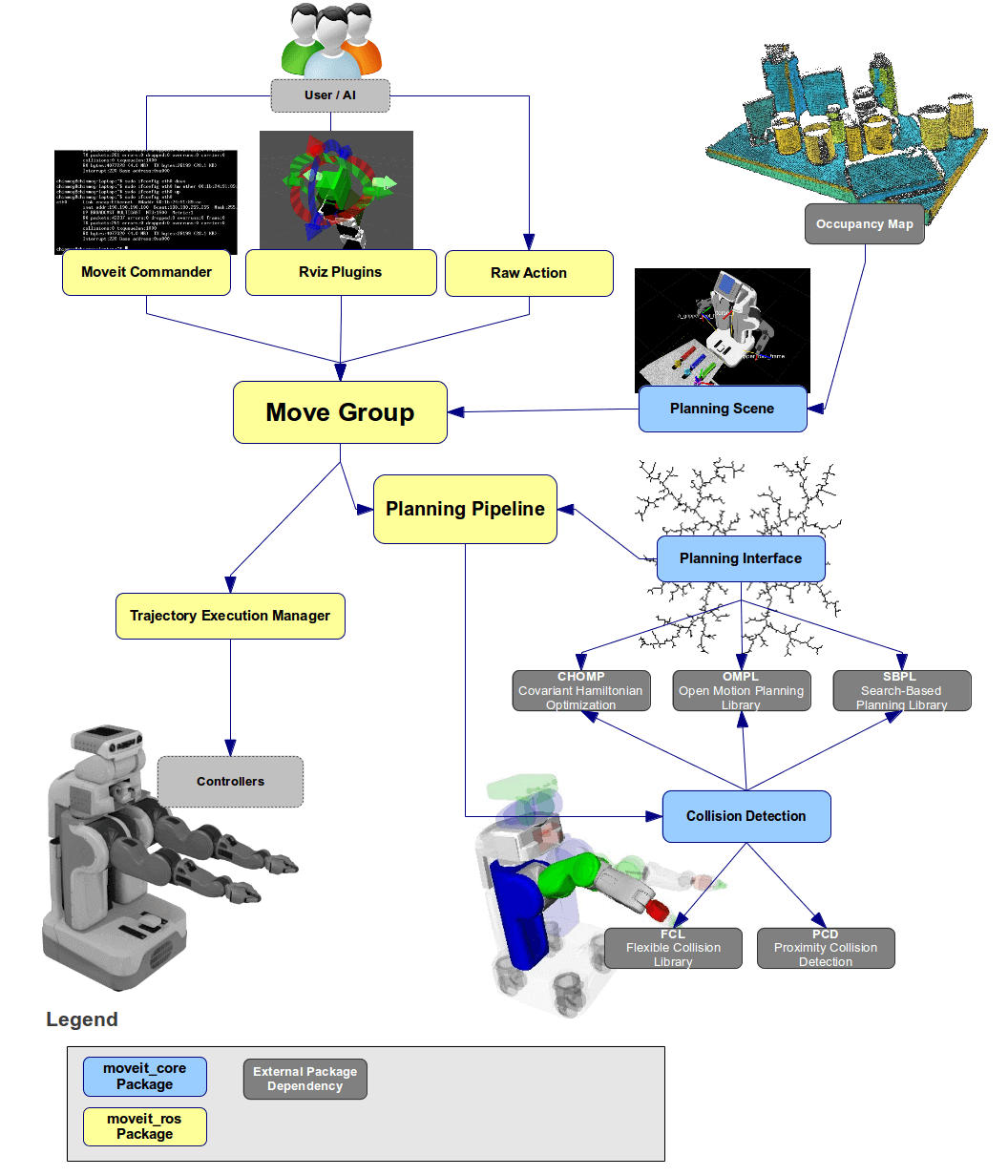
可以看到MoveIt底层运动算法调用了三个库:CHOMP planner, OMPL, SBPL。好像也集成了Pilz Industrial Motion.